
The Bibot System
Offices and schools are dynamic environments that frequently require rearrangement for various
activities. However, reconfiguring rooms can be time-consuming and labour-intensive, often requiring teams of people to complete. Imagine if a single individual could handle these transformations effortlessly.
This workshop offers hands-on experience in controlling a small army of swarm robots. Under the guidance of an instructor, participants will learn to become the sole orchestrator of a coordinated team, mastering control techniques that highlight the power of human-robot collaboration.
The Bibots are small, intelligent robots, made for teamwork. They are designed to be simple and cute, yet highly effective as a group and are aware of each other and their commands. Working together seamlessly to move furniture with precision.
Students: Sarim Mangi, Milan Tillmanns, Waris Ibrahimi & Carla Gasco









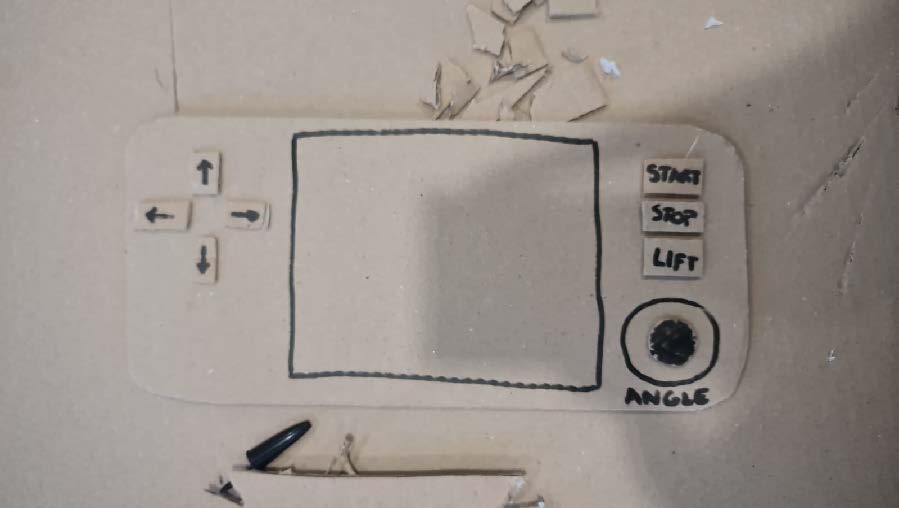
Through prototyping and testing different options to ensure the automation worked optimally, we decided on two different ways to control the Bibots.
We chose a final aesthetic for the robot, inspired by a simple and geometric design. The robots were modeled and 3D printed. After printing, the bots were sanded and we painted the light details in white.


To address how to teach how to control the Bibots on an individual scale, we came up with the idea of buying RC cars for this part of the workshop. We built an obstacle course that required learning how to handle the controls in order to pass this phase of the workshop.
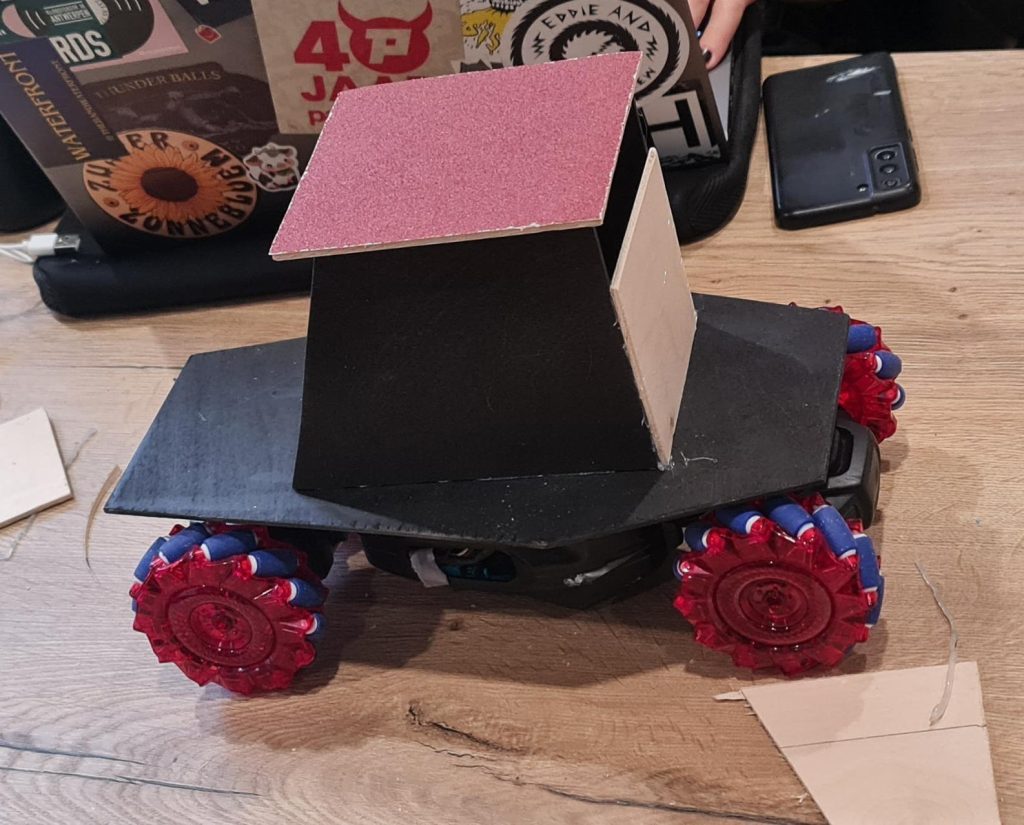
We had to modify the cars to reduce their speed and eliminate all unnecessary functions.
Additionally, we built a platform on top of them that would allow us to lift pieces of furniture, simulating the way in which the Bibots operate, and we spray painted the cars black.

We built different pieces of furniture to scale (chairs and tables) for the obstacle course, and we set up a route that had to be followed while trying to avoid collisions between the chair and the ‘Bibots’ with the rest of the furniture on the course.
To portray the other part of the workshop, and after a lot of previous prototyping, we began building an interactive table. On one hand, we 3D printed scaled furniture pieces and cut out a floor plan of an office in transparent acrylic.


Using a set of strategically placed magnets, a person positioned underneath the table (a bit like the ‘Wizard of Oz’) helped transport the layout from the iPad to the interactive table, thus simulating the operation of the Bibot system.
We chose the final layout for our workshop, following the advice of our coaches and professors, we decided to let go of the interactive table and focused on the individual handling of the Bibots, as it was more of a hands-on approach for the workshop.
